
Trocomotor Follower: A Part of Auto-Trolley-Hauling System
This is the 2020-2021 Year 3 second semester project of ISD. This project worked with Hong Kong International Airport (HKIA). The project vision a fully autonomous trolley hauling system (Trocomotor), since during interviews and shadowing, short of trolley hauling workers was observed. But due to short of time and manpower, only part of the proposed system is built which can also improved the status of current working process. Current trolley hauling work is done by workers using hauling scooters. But the scooters has limited power and limited space therefore can only handle around 20 trolleys at a time. Trocomotor follower can follow the track of the workers’ scooters by tacking the Apriltag sticked behind the scooter or the trolley. This allows workers to manipulate more trolleys at the same time by forming several trolley trains, solving the power and space issues at the same time.



Empathize
Our team conducted a site visit to HKIA and interviewed their staff and workers. The airport staff expressed concerns about the shortage of trolley hauling workers and increasing financial costs. Workers are reluctant to work at the airport due to its distance from residential areas, forcing the airport to offer higher wages to attract employees. Considering our project’s limited manpower and time constraints, we decided to implement a gradual worker replacement system, beginning with a collaborative approach that enhances current operations.
Problem Statement
How might we design equipment for trolley hauling workers that improves their working efficiency?
Solution
The long-term vision of the Trocomotor system includes:
-
Trocomotor Follower: Lead 10-20 trolleys simultaneously while following AprilTags
-
Trocomotor Leader: Small, flexible robot that leads the Followers
-
Trocomotor Localizer: Manipulate individual trolleys and position them behind the Followers
-
Trocomotor Auto Trolley: Fully autonomous trolley that can move independently
-
Trocomotor AI System: AI system that monitors trolley usage patterns and manages deployment
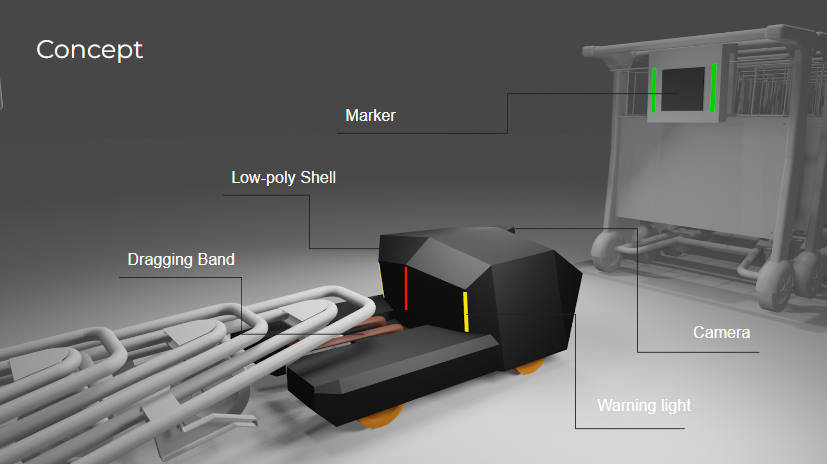
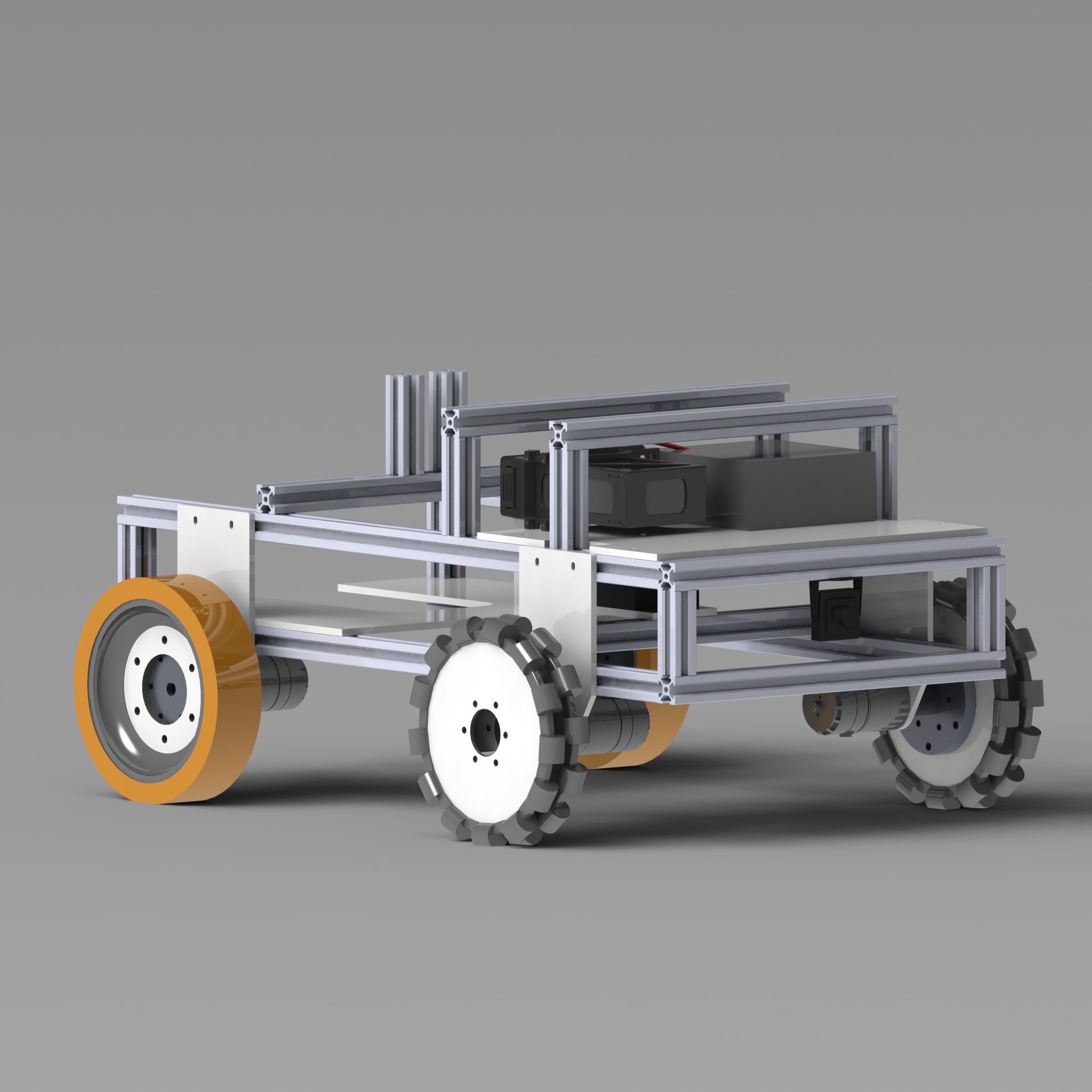
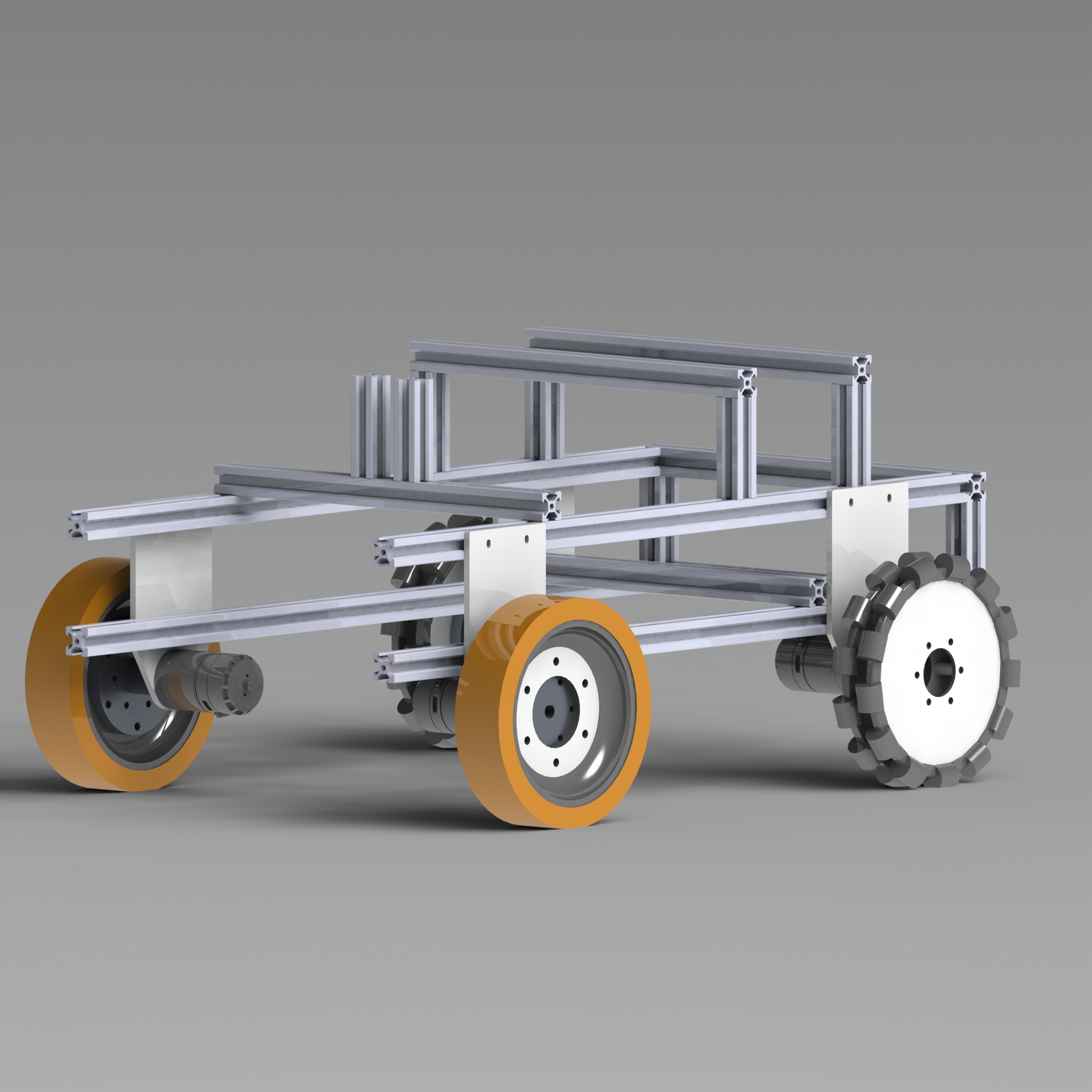
This project focuses on the Trocomotor Follower. The Follower is a high-powered, four-wheeled robot chassis equipped with a miniPC, high-resolution camera, and obstacle detection system (radar/ultrasonic sensors). It can haul up to 20 trolleys simultaneously and track AprilTags using its camera. Workers can attach the AprilTag to their scooters or to the rear of another trolley train.