
Gecko Inspired Robotics Gripper Development for Warehouse Automation
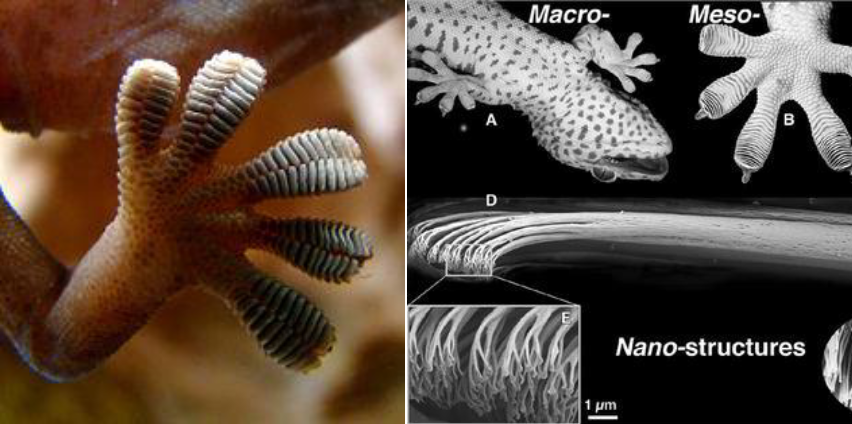
This Undergraduate Research Opportunities Program (UROP) project is named as Robotics Gripper Development for Warehouse Automation. The naming involves Gripper and Automation which means the research focus on developing a gripper mechanism which can be applied to warehouse environment mainly for automation purpose. The gripper mentioned above is not the normal mechanical gripper we see in our daily life but another kind of special gripper that require special material design for the touching surface of the gripper and the object to be gripped. The material is a kind of gecko inspired dry adhesive which was inspired by the gecko’s feet. For 2020 summer, the UROP research focus on mostly material design and fabrication and the mechanism mechanical design of the gripper.
Work
- Gecko adhesive material fabrication
- Gripper mechanical design